传感器数据融合:扩展目标追踪
分享一篇我在传感器融合研讨会上做的一篇报告
背景介绍
目标跟踪问题已被广泛应用于军事和民用领域。传统的点目标跟踪只能估计目标的运动,包括位置、速度和加速度等信息。当目标离传感器很远,或者传感器的分辨率不高时,点目标的假设是有效的。然而,对于复杂环境下的扩展目标跟踪问题,由于传感器获得的信息量增加,包括观察到的目标的大小、形状和方向等,有必要在估计目标运动的基础上增加扩展状态估计,以改进传统的点目标filtering模型。
除了具有多个散射中心的目标外,集体运动的目标群(如无人机群)也可以被认为是一个扩展目标,其中扩展目标对应于运动学参数相似的非刚性目标群。这样的群体看到它的组成和形状随着时间的推移而变化。
本报告旨在介绍如何跟踪多组目标,而每一组目标都被视为一个扩展目标或群体目标。
基本思想
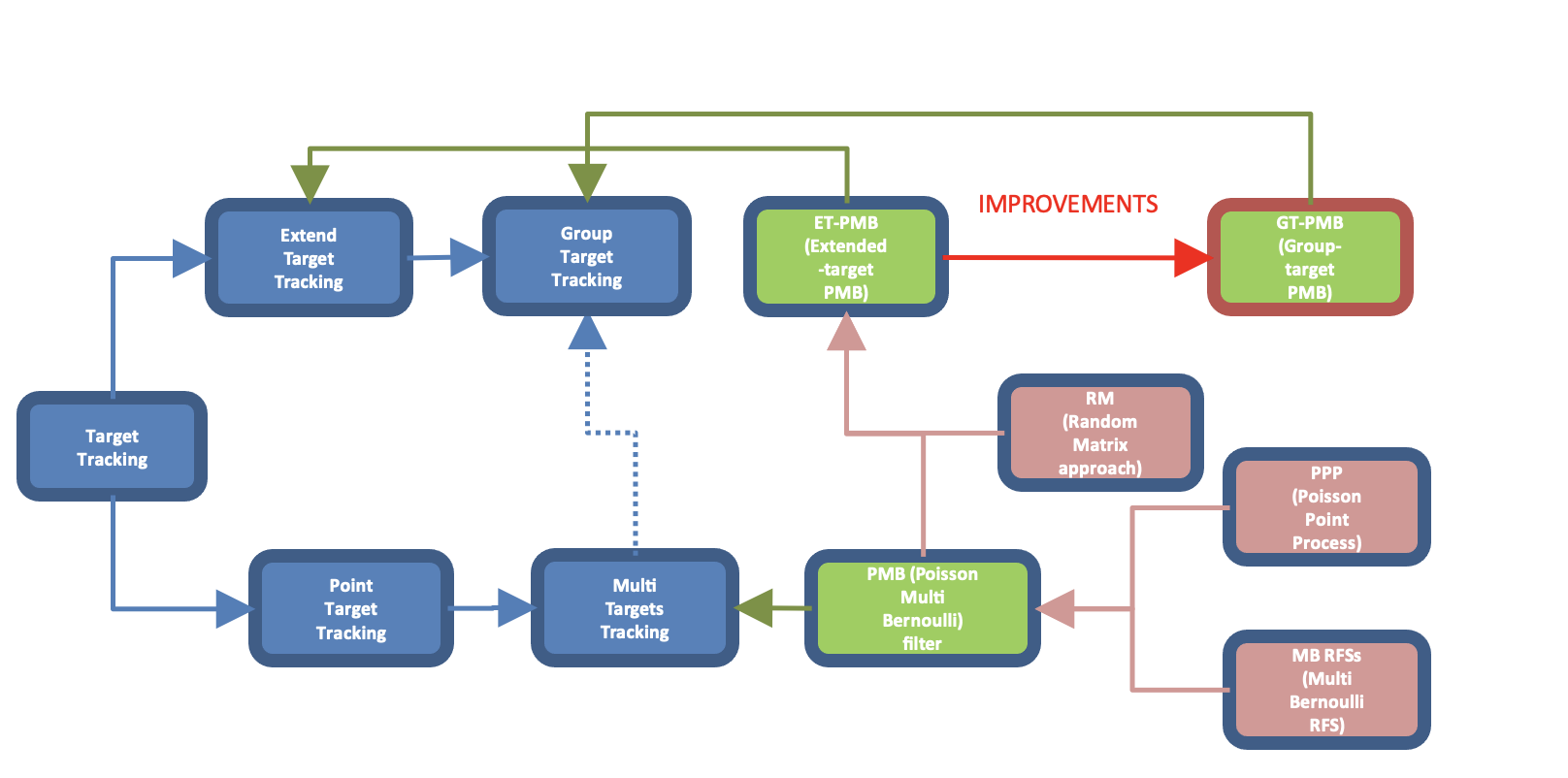
上图列出了目标跟踪的一些主要概念结构以及应用于多点目标跟踪(MTT)场景、扩展目标跟踪(ETT)和群体目标跟踪(GTT)的算法。
泊松-多伯努利(PMB)滤波器。PMB滤波器是基于随机有限集(RFS)的滤波器之一,是最近最流行的MTT方法。该算法基于泊松点过程(PPP)和多伯努利(MB)RFS来模拟多目标系统,跟踪的目标可以用贝叶斯方程和查普曼-科尔莫戈罗夫方程来递归估计。PMB在MTT情况下,在效率和兼容性之间进行了良好的权衡。
随机矩阵(RM)方法:这是一种众所周知的优雅而有效的扩展目标跟踪方法,它将扩展目标的形状视为一个椭圆。因此,它可以由一个状态向量和一个受建模和测量噪声影响的正半形矩阵表示。
扩展目标PMB(ET-PMB)滤波器:通过结合RM和PMB方法的扩展目标跟踪算法。
群体目标PMB(GT-PMB)滤波器:根据群体目标的特点,采取一些改进措施,为群体目标提供一种更有效的非刚性ET-PMB算法。
方法
参考
[1] Louis Guerlin, Benjamin Pannetier, Mich`ele Rombaut, Maxime Derome . Study on group target tracking to counter swarms of drones. Proc. SPIE11423, Signal Processing, Sensor/Information Fusion, and Target RecognitionXXIX, 1142304 (22 April 2020); doi: 10.1117/12.2558119.
[2] Koch, J. W., ”Bayesian approach to extended object and cluster tracking using random matrices,” IEEETransactions on Aerospace and Electronic Systems44, 1042–1059 (2008).
[3] Granstrom, K., Fatemi, M., and Svensson, L., ”Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering,” IEEE Transactions on Aerospace and Electronic Systems56, 208–225 (2019).
[4] Granstrom, K., Lundquist, C., and Orguner, O., ”Extended target tracking using a gaussian-mixture philtre,” IEEE Transactions on Aerospace and Electronic Systems48, 3268–3286 (2012)
 Wechat
Wechat- Paypal
- Alipay


