图形学笔记:变换 Transformations
未完待续… …
从这篇文章开始整理我在学校学到的计算机图形学相关知识,原则是如果在网上没有找到清楚的解释,我会尝试自己解释出来,如果找到了就直接贴链接。
CG和CV的关系
首先想解释一下 Computer Graphics和 Computer Vision的关系和区别.
大致上讲,CG是图像和视频合成的工具和机制,而CV通常用于分析和提取视频和图像的语义内容,这两个领域的技术没有明显的界限,但是目的稍有不同。

基础
向量积 Vector Cross product
关于Cross product维基百科解释的非常详细。
$$\vec u\times\vec v=|\vec u||\vec v|sin\theta\vec c$$
需要特别注意的是两个向量u和v在三维空间的叉乘的几何意义
数量积 Vector Dot Product
关于Dot Product 的相关知识。
$$\vec u\cdot\vec v=|\vec u||\vec v|cos\theta$$
变换
仿射组合 The affine combination
首先通过下文先了解一下什么是仿射变换或者叫仿射映射.
如何通俗地讲解「仿射变换」这个概念? - 马同学的回答 - 知乎
而仿射函数实际上就是表示这一变换过程的函数,一般形式是$f(\vec x)=A\vec x+\vec b$,$A$是一个$m\times k$矩阵,$\vec x$是一个$k$向量, $\vec b$是一个$m$向量。
仿射组合的概念更加抽象,可以通过下面这个例子了解一下两个二维向量的仿射组合:
仿射组合为什么代表一条线? - 电猫哥electricat的回答 - 知乎
这个例子证明了两个二维向量的仿射组合可以代表一条直线,可以发现仿射组合其实是对于给定向量$\vec v_1,\vec v_2$(者点$p_1,p_2$)与一组权重$[\lambda_0,\lambda_1]$的线性变换,而且必须满足$\lambda_1+\lambda_2=1$,即$\vec y=\lambda_1\vec v_1+\lambda_2\vec v_2$。推广到$n$个向量定义如下:
$$ 组合 \{v\in V|v=\sum_{i=0}^{n}\lambda_iv_i,with\sum_{i=0}^{n}\lambda_i=1\} 被称为向量v_i的仿射组合$$
未完,这部分以后会补张图…)
重心坐标 Barycentric Coordinates
上面介绍的内容其实隐含了一个前提:坐标系类型已确定。在数学中,坐标系的类型很多,例如齐次坐标系(homogeneous coordinates or projective coordinates),和笛卡尔坐标系(Cartesian coordinate system),在不同的坐标系下,对事物的描述方法和变换自然是不同的。各个坐标的关系可以参考下面的文章:
从带号面积到坐标系的建立 - PeaucellieRay的文章 - 知乎
这里主要介绍一下重心坐标系,找到一片讲的比较清楚的文章。
重心坐标(Barycentric coordinates) - 杨超的文章 - 知乎
通过上文其实我们可以发觉重心坐标的表示方法就是点$P_i$的仿射组合,而$w_i$就是组合权重。
值得注意的是,上文的三角形其实是放在一个仿射空间(affine space)里的。维基百科这样描述仿射空间:
仿射空间是没有起点只有方向大小的向量所构成的向量空间。
我的理解是仿射空间就是没有原点的线性空间,这里就不展开讨论了。
回到重心坐标的话题上来,通过结合仿射组合,有下面的定义:
$$在一个仿射空间的坐标系内,给出点集B=\{p_0,…p_n\}和点p的仿射组合:$$
$$p=\sum_{i=0}^{n}\lambda_ip_i\ with\ \lambda_i\ge0;\ \sum_{i=0}^{n}\lambda_i=1\lambda_i$$
$$就是点p的重心坐标(barycentric\ coordinates).$$
通过多个点确定一个坐标确实感觉很费劲,但是如上个链接里的文章所说,这个坐标系大有可为,在计算机图形学中需要使用一个非常重要的技术——线性插值,就用到重心坐标,这个以后的文章一定也会提到。
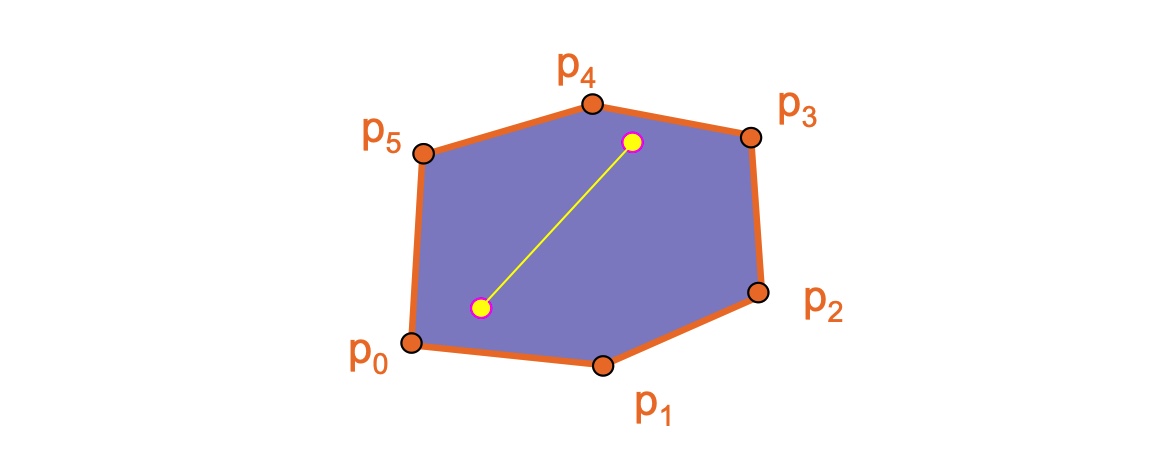
凸包 Convex Hulls
凸包的几何意义是给定空间一堆离散的点,计算能够包含这些点的一个凸多边形,如下图可以用凸包将general mesh的点精简成convex mesh,在碰撞检测中省去了大量内存。
凸包的表示方法如下,可以发现可以利用仿射组合保证凸性(Convexity),原因暂不讨论。
$$点集 co\{p_0,…,p_n\}=\{p|p=\sum_{i=0}^{n}\lambda_ip_i,\sum_{i=0}^{n}\lambda_i,and\ \lambda_i\ge0,i=0,…,n\};co\{p_0,…,p_n\}就是点集p_1,…,p_n的凸包$$
仿射映射 Affine mappings
其实仿射映射跟前面所说的仿射变换的概念基本一致,这里重新详细的介绍一下,简单的说仿射映射就是线性变化加平移,维基百科里关于仿射映射给出了两个定义,第一个比较好理解如下:
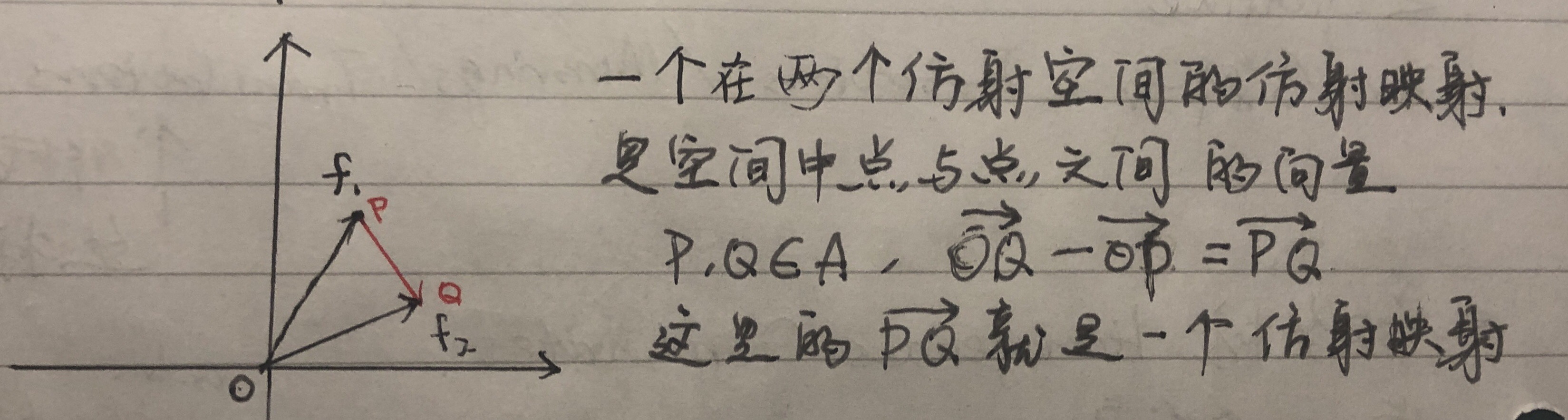
另一个定义对我来说比较难理解:

我的理解是,在向量集(点集)中,每个向量$\vec a_i$通过变换后,对应的权重$\lambda_i$是不变的,既然权重没变,相对位也没有变,所以保留了这个向量集的重心。
仿射映射具有如下性质:
1. 一条线映射之后还是一条线。
2. 有限集映射后任然是有限集。
3. 平行的物体(线,平面,...)映射后依然是平行的。
4. 物体面积,体积和长度的所占比例在映射后不变。
刚性变换 Rigid Transformation
刚性变换听着名字很奇怪,其实简单的说就是向量(点)只在位置和朝向上发生了改变的变换。下面两篇文从不同角度介绍了不同的坐标变换之间的关系,相互比较更容易理解。
一文读懂图像中点的坐标变换(刚体变换,相似变换,仿射变换,投影变换)
【Computer Vision】图像单应性变换/投影/仿射/透视
在了解完刚性变换的概念之后,给出如下定义:
$$一个坐标变换T如果满足:x,y\in\mathbb{R}^3:|T(x)-T(y)|=|x-y|,则这个变化是刚性的。$$
刚性变化有如下性质:
1. 刚性变化就是一种仿射。
2. 刚性变化包括:旋转(线性);镜像(线性);平移(非线性,但是可以通过齐次坐标“固定”,下面也会介绍。)
齐次坐标 Homogenous Coordinates
- Wechat
- Paypal
- Alipay





